Required Capabilities in Self-Navigating Vehicle-Processing Architectures
This article introduces the software algorithms used in self-navigating vehicle processing architectures and covers critical safety-related requirements.
Join the DZone community and get the full member experience.
Join For FreeThis article is adapted from my new book, Modern Computer Architecture and Organization. Second Edition, published by Packt Publishing. For more detail on the mathematics and economics of self-driving vehicle architectures, including details on implementing the CNN image recognition architecture discussed in this article using TensorFlow, please see Chapter 16 of the book.
Overview of Self-Driving Vehicles
Several major motor vehicle manufacturers and technology companies are actively pursuing the development and sale of fully self-driving, or autonomous, motor vehicles. The utopian vision of safe, entirely self-driving vehicles beckons us to a future in which commuters are free to relax, read, or even sleep while in transit and the likelihood of being involved in a serious traffic accident is drastically reduced from the hazardous situation of today.
While this is the dream, the current state of self-driving vehicles remains far from this goal. Experts in the field predict it will take decades to develop and deploy the technology to support the widespread use of fully autonomous transportation.
To understand the requirements of autonomous driving systems, we begin with the inputs a human driver provides to control the operation of a current-generation motor vehicle. These are:
- Gear selection: For simplicity, we assume the presence of an automatic transmission that allows the driver to select between park, forward, and reverse.
- Steering: The input for this is the steering wheel.
- Accelerator: Pressing a floor pedal accelerates the vehicle in the direction selected by the gearshift.
- Brake: Whether the vehicle is moving forward or backward, pressing the brake pedal slows the vehicle and eventually brings it to a stop.
To achieve the goals of fully autonomous driving, technology must advance to the point that control of all four of these inputs can be entrusted to the sensors and computing systems present in the vehicle.
To understand the current state of self-driving vehicle technology in relation to the goal of fully autonomous driving, it is helpful to refer to a scale that defines the transitional steps from entirely driver-controlled vehicles to a fully autonomous architecture. This is the subject of the next section.
Driving Autonomy Levels
The Society of Automotive Engineers (SAE) has defined six levels of driving automation, covering the range from no automation whatsoever to fully automated vehicles that have no human driver. These levels are:
Level 0: No Driving Automation
This is the starting point, describing the way motor vehicles have operated since they were first invented. At Level 0, the driver is responsible for all aspects of vehicle operation, which includes reaching the intended destination while ensuring the safety of the vehicle, its occupants, and everything outside the vehicle. Level 0 vehicles may contain safety features such as a forward collision warning and automated emergency braking. These features are considered Level 0 because they do not control the vehicle for sustained periods of time.
Level 1: Driver Assistance
A Level 1 driving automation system can perform either steering control or acceleration/deceleration control for a sustained period, but not both functions simultaneously. When using Level 1 driver assistance, the driver must continuously perform all driving functions other than the single automated function. Level 1 steering control is called Lane-Keeping Assistance (LKA). Level 1 acceleration/deceleration control is called Adaptive Cruise Control (ACC). When using a Level 1 driver assistance feature, the driver is required to remain continuously alert and ready to take full control.
Level 2: Partial Driving Automation
Level 2 driving automation systems build upon the capabilities of Level 1 by performing simultaneous steering control and acceleration/deceleration control. As with Level 1, the driver is required to always remain alert and ready to take full control.
Level 3: Conditional Driving Automation
A Level 3 driving automation system can perform all driving tasks for sustained periods of time. A driver must always be present and must be ready to take control if the automated driving system requests human intervention. The primary difference between Level 2 and Level 3 is that in Level 3, the driver is not required to continuously monitor the performance of the automated driving system or maintain awareness of the situation outside the vehicle. Instead, the human driver must always be ready to respond to requests for intervention from the automated driving system.
Level 4: High Driving Automation
A Level 4 automated driving system can perform all driving tasks for sustained periods of time and is also capable of automatically reacting to unexpected conditions in a way that minimizes the risk to the vehicle, its occupants, and others outside the vehicle. This risk minimization process is referred to as driving task fallback, and it may involve actions that result in avoiding risk and resuming normal driving or performing other maneuvers, such as bringing the vehicle to a stop at a safe location. A human driver may take over control of the vehicle in response to driving task fallback, or at other times if desired. However, unlike the lower driving automation levels, there is no requirement for anyone in the Level 4 vehicle to remain ready to take over control of the vehicle while it is in operation. It is also not required that vehicles with Level 4 automation include operating controls for human drivers. The primary use case for Level 4 driving automation is in applications such as taxis and public transportation systems where vehicle operation is constrained to a specific geographic region and a known set of roads.
Level 5: Full Driving Automation
In a Level 5 vehicle, all driving tasks are always performed by the automated driving system. There is no need for control inputs that would allow a human driver to operate the vehicle—all vehicle occupants are passengers. A Level 5 driving system must be capable of operating a vehicle on all road types, at all times of day, and in all weather conditions in which a responsible and typically skilled human driver would be able to drive safely. The only driving-related task the human occupants of the vehicle perform is selecting a destination.
In 2022, most vehicles on the road are at Level 0. Many newer vehicle models contain Level 1 and Level 2 automation features. There have been almost no Level 3 systems approved for operation in countries around the world. The Level 3 systems that have received regulatory approval are typically limited to specific operating conditions, such as driving in heavy traffic on highways.
An important distinction in the performance requirements for autonomous vehicles compared to many traditional computing applications, such as smartphones and web servers, is the very real potential for autonomous vehicles to injure and kill vehicle occupants and others outside the vehicle. This is the topic of the next section.
Hardware and Software Requirements for Self-Driving Vehicles
Human drivers must sense the state of their vehicles and constantly evaluate the surrounding environment, keeping track of stationary and moving obstacles. The primary means of gathering this information is through vision.
Using eyesight, a competent driver monitors vehicle instrumentation, principally the speedometer, and scans the surrounding environment to perform lane keeping, maintain appropriate spacing from other vehicles, obey traffic signs and signals, and avoid any obstacles on or near the road surface.
Human drivers rely on other senses to a lesser degree, including the use of hearing to detect signals, such as car horns and railway crossings. The sense of touch comes into play as well, for example when bump strips are installed on a highway surface to warn of an upcoming intersection. The sense of touch can also assist when an inattentive driver drifts off the roadway and onto the shoulder, which typically has a significantly different texture from the road surface.
Sight, hearing, and touch are the only inputs a human driver uses while driving. Looked at in one way, this demonstrates that the information input provided by these senses enables human drivers to travel billions of miles each day, largely successfully. Viewed differently, significant gaps obviously remain in the processes of sensing and executing appropriate responses to hazardous situations as evidenced by the thousands of deaths that occur daily in traffic accidents.
To be accepted by the driving public, autonomous driving systems must not be merely as safe as human drivers—they must be demonstrably far superior to humans in terms of the rate of traffic accidents per mile traveled. This high level of performance will be necessary because many human drivers will be reluctant to turn over control to an automated system until they have been convinced the system is superior to their own (perhaps imagined) high level of driving skill.
The next section introduces the types of sensors used in autonomous driving systems and their contributions to meeting the goals of safety and reliability.
Sensing Vehicle State and the Surroundings
Autonomous driving sensors must accurately measure the state of the vehicle itself as well as the location and velocity (the combination of speed and direction of motion) of all significant objects in the vehicle’s vicinity. The following sections describe the primary sensor types used in current generations of autonomous vehicle designs.
GPS, Speedometer, and Inertial Sensors
An autonomous vehicle must continuously maintain awareness of its state, which includes its location, direction of movement, and speed. Vehicle location information is used for low-level driving tasks like lane keeping, and for higher-level functions such as developing a route to a destination.
Low-level location measurements enable information to be derived from lidar data or from video camera images that provide information including the vehicle’s position relative to lane-marking lines. This information is high-resolution (meaning accuracy is measured in centimeters) and is updated at a high rate (perhaps dozens or even hundreds of times per second), enabling smooth and continuous responses by the driving system to changing conditions.
The information provided by a Global Positioning System (GPS) sensor is updated less frequently (perhaps a few times per second) and may have much lower accuracy, with position errors of multiple meters. The information provided by a GPS receiver is ideal for use in route planning, but it is likely to provide too coarse of a measurement and to be updated too infrequently to be of use for keeping a vehicle centered in a lane.
GPS receivers have a notable performance limitation because they rely on the continuous reception of satellite signals to enable their operation. In situations where visibility of the sky from the vehicle is impaired, perhaps on a road with dense tree cover, in the urban canyon of a city center, or in a tunnel, the GPS receiver may not work at all.
The vehicle’s speedometer normally provides an accurate measurement of vehicle speed based on tire rotation rate. At times, the speedometer measurement may be an inaccurate representation of the vehicle speed due to tire slippage, perhaps resulting from the presence of mud or ice on the roadway. As a backup to the speedometer, GPS provides an accurate measurement of vehicle speed whenever it is receiving the necessary satellite signals. In this situation, divergence between the vehicle speedometer reading and the speed measured by the GPS may be an indication of tire slippage, which is an unsafe condition.
Modern vehicles often contain inertial sensors in the form of accelerometers and, in some cases, a gyroscope. An accelerometer measures the acceleration, or rate of change of velocity, along a single axis of motion. Humans sense acceleration as the force pressing them back into the seat while a vehicle is speeding up and as the force pushing them sideways during an aggressive turn.
Motor vehicles typically contain two accelerometers: one to measure acceleration and deceleration along the forward-reverse axis of motion, and a second measuring acceleration along the side-to-side axis of motion. The accelerometer measuring side-to-side acceleration measures the inertial effects of turns. A gyroscope can measure the vehicle’s rate of turn directly.
Accelerometers can provide measurements at very high rates and are used for purposes such as deploying airbags within milliseconds after a collision has been detected. The accelerometers and gyroscope in a vehicle track its orientation and velocity, enabling it to maintain an accurate understanding of its relationship to its surroundings.
The GPS, speedometer, and inertial sensors provide an estimate of the vehicle’s state. To drive safely and reach a requested destination, an autonomous driving system must also sense the environment surrounding it. The sensors that perform this function are the subjects of the following sections.
Video Cameras
Some autonomous driving systems employ an array of video cameras as the primary sensor of the external environment. The video cameras used in these vehicles have features that are familiar to users of consumer-grade digital video cameras, including handheld devices and the video cameras in smartphones. An autonomous vehicle video camera is a moderately high-resolution device, typically 1,920x1,080 pixels. A vehicle may have several cameras located around its periphery with overlapping fields of view.
The use of multiple cameras highlights one improvement of autonomous vehicles over human-driven vehicles: vision systems used in autonomous vehicles are capable of simultaneously and continuously monitoring activity around the vehicle in all directions. Human drivers, in comparison, can only look in one direction at a time, with some limited peripheral vision across a greater field of view. The presence of internal and external mirrors in human-driven vehicles helps to mitigate this inherent limitation of human vision, though there are typically substantial blind spots that human drivers must be cognizant of and incorporate into their situational awareness.
The greatest challenge associated with using video cameras in autonomous driving systems is that the video images output by these devices are not directly useful in performing driving tasks. Substantial processing must be performed to identify significant features in the images, combine those features to recognize individual objects, and then understand what the objects are doing and react appropriately. We will discuss the processing of video images in autonomous driving systems in the Perceiving the environment section later in this chapter.
Radar
One limitation of video cameras in autonomous driving systems is that they provide a flat, two-dimensional image of the scene viewed by the camera. Without substantial further processing, it is not possible to tell if the portion of the scene represented by any individual pixel is close to the vehicle (and therefore potentially an obstacle that requires an immediate reaction) or something that is far away and is of no relevance to the driving task.
The technology of radio detection and ranging (radar) provides a solution to part of this problem. A radar system repetitively sends out pulses of electromagnetic energy into the environment and listens for echoes of those signals bouncing off objects in its vicinity.
A radar system can detect objects and provide measurements of the direction to each object as well as the distance to those objects. It can also measure the speed of objects relative to the vehicle carrying the radar system. A radar system can track a vehicle several hundred feet ahead and maintain a safe following distance when used as part of an ACC.
Radar systems have some significant limitations, however. Compared to a video camera, the scene perceived by a typical automotive radar system is much blurrier and has lower resolution. Radar systems are also prone to noisy measurements, which reduces confidence in the quality of the information they provide.
Despite those limitations, radar sensors perform without degradation in situations where video cameras often fail, such as in heavy rain, snow, and dense fog.
Lidar
Instead of using video cameras, some autonomous vehicle developers have elected to rely on lidar systems for determining vehicle location and orientation and detecting objects in the vehicle’s vicinity. A light detection and ranging (lidar) sensor uses a laser to scan the area around the vehicle and collect data from the reflections received from surfaces and objects.
Each measurement by a lidar device represents the distance from the lidar laser illuminator to a surface that reflects some of the laser energy back to the lidar sensor. The direction of the laser beam relative to the vehicle at the time of each sample is known to the lidar processing software. The distance to the reflecting point and back is calculated by measuring the time between when the laser pulse is emitted and the time the echo arrives at the lidar sensor, which is referred to as the pulse’s time of flight. The round-trip distance traveled by the pulse is equal to the pulse’s time of flight multiplied by the speed of light through the atmosphere.
By collecting measurements in rapid succession in all directions around the vehicle, a three-dimensional set of points called a point cloud is developed. This point cloud represents the distance from the lidar sensor to surrounding surfaces, including the road surface, buildings, vehicles, trees, and other types of objects.
Sonar
Sound navigation and ranging (sonar) performs a function intuitively similar to radar and lidar systems, except sonar systems emit pulses of sound rather than electromagnetic waves.
Sonar systems generally operate at much shorter ranges than radar and lidar systems and are mainly used to detect obstacles in close-quarters situations, like when parking between other vehicles or for detecting when a vehicle in an adjacent lane on a highway is approaching uncomfortably close.
Perceiving the Environment
As sensors collect raw information about the vehicle and its surroundings, the sensor output information is not immediately usable for performing effective vehicle control. Several stages of processing must be performed to convert raw sensor measurements into actionable information that can be used for autonomous driving. The following sections describe the processing steps needed to convert sensor data into driving decisions in autonomous vehicles that rely on video cameras as primary sensors. We begin with the processing of images from video cameras using convolutional neural networks.
Convolutional Neural Networks
Artificial neurons are mathematical models intended to represent the behavior of biological neurons, which are the brain cells responsible for perception and decision making.
In modern autonomous vehicle systems that use video cameras to sense the environment, the leading technology used to extract decision-quality information from video images captured by cameras is the convolutional neural network.
A Convolutional Neural Network (CNN) is a specialized type of artificial neural network that performs a form of filtering called convolution on raw image data to extract information useful for detecting and identifying objects within the image.
An image captured by a video camera is a rectangular grid of pixels. The color of each pixel is represented by a set of red, green, and blue intensities. Each of these intensities is an 8-bit integer ranging from 0 to 255. An intensity of 0 means the corresponding color is not present in the pixel’s color, while 255 represents the maximum intensity for that color. A pixel’s color is represented by the three red, green, and blue values, abbreviated as RGB. Some examples of RGB colors are listed in the following table:
| Examples of RGB colors |
|||
|---|---|---|---|
| Red Intensity | Green Intensity | Blue Intensity | Color |
255 |
0 |
0 |
Red |
0 |
255 |
0 |
Green |
0 |
0 |
255 |
Blue |
0 |
0 |
0 |
Black |
255 |
255 |
255 |
White |
128 |
128 |
128 |
Gray |
255 |
255 |
0 |
Yellow |
255 |
0 |
255 |
Magenta |
0 |
255 |
255 |
Light Blue |
A CNN receives as its input the RGB image captured by a video camera as three separate two-dimensional arrays of 8-bit pixel colors, one each for red, blue, and green. We will refer to these as the three color planes of the image.
The CNN then performs convolution filtering on each of the color planes. A convolution filter consists of a rectangular grid of numbers that is typically small, perhaps 2 rows by 2 columns. The convolution operation begins at the top-left corner of each color plane. Mathematically, convolution is performed by multiplying the color intensity at each pixel location by the number at the corresponding location in the convolution filter and then summing the products of these operations over all elements in the filter. The result of this operation is one element of the convolution output. We’ll go through an example shortly to help clarify this process.
The convolution continues by shifting the filter 1 or more pixels to the right, and then repeating the multiplication and summing operations with the image pixels covered at the filter’s new location. This produces the convolution output at the second location in the top row. This process continues all the way across the top row of the image, and then the filter shifts back to the left edge and moves downward by 1 or more pixels, and repeats the process across the second row in the image. This sequence of shifting the filter, multiplying the filter elements by the pixel color intensities at the filter location, and summing the results continues across the entire image.
Example CNN Implementation
We’ll now present a simple example to demonstrate how CNNs work. Let’s say we have an image that is 5x5 pixels and a convolution filter that is 2x2 pixels. We will only look at one of the three color planes, though in real filters, the same operations will be performed separately across all three color planes.
We will shift the filter by 1 pixel to the right and 1 pixel downward each time such movement is required. The distance (in terms of pixels) the convolution filter shifts each time it relocates is called the stride. For simplicity, all pixels and convolution filter elements in the example will be represented as single-digit integers. The following table contains our example color plane data:
| Example color plane data |
||||
|---|---|---|---|---|
1 |
4 |
6 |
7 |
8 |
2 |
9 |
2 |
0 |
5 |
8 |
2 |
1 |
4 |
7 |
3 |
9 |
0 |
6 |
8 |
2 |
1 |
4 |
7 |
5 |
The next table contains the convolution filter. Each number is one filter coefficient:
| Example convolution filter | |
|---|---|
7 |
2 |
8 |
0 |
We will be using a stride of 1, which means each sequential evaluation of the filter output will shift 1 pixel to the right and then 1 pixel downward and back to the left edge when the right edge of the image has been reached.
For the first filter evaluation, we multiply the pixels in the upper-left corner of the image by the corresponding elements in the convolution filter, as shown in this table:
| First multiplication step in convolution | ||||
|---|---|---|---|---|
1 x 7 |
4 x 2 |
6 |
7 |
8 |
2 x 8 |
9 x 0 |
2 |
0 |
5 |
8 |
2 |
1 |
4 |
7 |
3 |
9 |
0 |
6 |
8 |
2 |
1 |
4 |
7 |
5 |
After multiplying the color plane intensities by the convolution filter elements in the 2x2 grid, we add them together, as shown in this equation:

First multiplication and summing operation in convolution
The result of the element-by-element multiplication of the color plane intensities by the filter coefficients, followed by summing each of those results, is one element of our output array, C1,1, which we place in row 1, column 1 of our output array, as shown in this table:
| First convolution output element | |||
|---|---|---|---|
31 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Next, we shift the filter grid one position to the right and perform the multiply-and-sum operation again, as shown here:
| Second multiplication step in convolution | ||||
|---|---|---|---|---|
1 |
4 x 7 |
6 x 2 |
7 |
8 |
2 |
9 x 8 |
2 x 0 |
0 |
5 |
8 |
2 |
1 |
4 |
7 |
3 |
9 |
0 |
6 |
8 |
2 |
1 |
4 |
7 |
5 |
After multiplying the color plane intensities at the second filter location by the convolution filter elements, the result is shown in this equation:

Second multiplication and summing operation in convolution
This table shows the convolution output after the second element has been inserted at row 1, column 2:
| Second convolution output element | |||
|---|---|---|---|
31 |
112 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
We continue shifting 1 pixel to the right for each evaluation across the top row. Because our filter is 2 pixels wide and the image is 5 pixels wide, we can only place the filter in 4 locations without running the filter off the image. This is the reason the filter output array has 4 rows and 4 columns.
After the top row of the image is complete, we bring the filter back to the left image edge and move it down 1 pixel to compute the element in row 2, column 1 (C2,1). This process repeats across the entire image until it ends at the bottom-right corner. For our 5x5 image, the completed output of the convolution operation is shown in this table:
| Result of convolution operation | |||
|---|---|---|---|
31 |
112 |
72 |
65 |
96 |
83 |
22 |
42 |
84 |
88 |
15 |
90 |
55 |
71 |
44 |
114 |
While this explanation of convolution may have seemed a bit tedious and unenlightening, we are now getting to the good part!
CNNs in Autonomous Driving Applications
These are the most interesting points related to the use of convolution filtering in video image processing for autonomous driving systems:
- Mathematically, convolution consists of the simple operations of multiplication and addition.
- CNN training consists of repeated trials that present the neural network with a set of input data along with the “correct” output that should be produced when presented with that data. The training process adjusts the weights within the convolution filters of the CNN to improve its ability to respond correctly to the given inputs on each iteration.
- As part of the training process, the CNN discovers the best data values to place at each location in its convolution filter tables.
To provide a concrete example, consider the problem of steering a vehicle to remain properly centered within its lane. To train a CNN to perform this task, the general procedure is to record a series of video segments from vehicle cameras together with appropriate steering commands that the autonomous system must attempt to replicate as its output.
The training dataset must provide sufficient variety to ensure the behavior learned by the CNN covers the full range of its intended operating conditions. This means the training data should include straight roads and roads with a variety of curves. The data should also include daytime and nighttime driving, and other conditions that may be encountered, such as different types of weather.
During training, each training example is presented to the network as a video image along with the correct steering response. As the CNN learns how to respond properly to the varying inputs, it adjusts the coefficients in its convolution filters to identify image features that are useful in performing the desired tasks.
One image feature that is particularly useful in autonomous driving is edge detection. Edge detection involves locating the dividing lines that separate distinct portions of the image from one another. For example, the lines painted on roadways are always in a very different color from the road surface to make them highly visible to drivers, both human and autonomous.
The most interesting, even fascinating, attribute of the CNN training process is that by simply presenting video frames of road surfaces to a CNN along with accurate examples of the desired outputs, the CNN will discover image attributes that are useful (such as edges) and build convolution filters automatically that are specifically tuned to identify useful features.
Because the CNN filter is applied repeatedly across the entire image, it is possible for the filter to detect objects wherever they may appear in the image. This is an important feature for autonomous driving because it is not possible to predict the location in a video image where an important object may appear.
Real-world applications of CNNs may contain several convolution filters, each containing different sets of coefficients. Each of these filters is tuned during the training process to seek out different types of relevant features that can be processed in later stages of the network to perform higher-level functions, like identifying stop signs, traffic lights, and pedestrians.
A complete CNN design contains one or more stages of convolution that each operates as described in this section. The initial convolution stage performs filtering to detect simple features like edges, while later stages combine these features to identify more complex objects like stop signs.
To reliably detect a feature, such as a stop sign, under varying conditions, the training data must contain images of stop signs as seen from nearby and far away, as well as when looking at it straight on and from off to the side at an angle, all under a variety of lighting and weather conditions.
Within the CNN structure, the data elements computed in each convolution stage pass through an activation function to produce the final output of the stage. Although many types of functions can be used for this purpose, a common activation function is the Rectified Linear Unit function, abbreviated as RELU.
The RELU activation function is a very simple formula: given the table of output values from a convolution operation such as our convolution result table above, examine each element. If the element is less than 0, replace it with 0. That’s all there is to it. Our simple example table does not contain any negative elements, so applying RELU will not change it. In real applications, the RELU activation function provides important benefits, including improved training speed compared to other common activation functions.
Another type of stage used in CNN architectures is the pooling stage. High-resolution images contain a large number of pixels. To keep memory consumption and processing requirements within achievable limits, it is necessary to reduce the quantity of data flowing through the network while retaining the features that lead to the correct recognition of objects within the image. One way to do this is a technique called pooling. Pooling combines multiple elements in an input table into a single element in the output table. For example, each 2x2 pixel subset of our convolution result table could be combined to reduce the size of the output from that subset to a single numerical value.
There are several ways to combine the pixels within a subset into a single value. One obvious possibility is to compute the average. For the 2x2 pixel region in the upper-left corner of the table, the average is (31 + 112 + 96 + 83) / 4 = 80.5). While averaging provides a representation that includes effects from all the pixels in the region, this has not proven to be a pooling method providing the best performance in CNNs. Instead, in many cases, simply selecting the maximum value within the region as the pool result has been shown to give good performance. In this example, the maximum value of the selected region is 112.
This technique is referred to as max pooling. This table shows the results of applying max pooling with a region size of 2x2 to our convolution result table:
| Result of 2x2 max pooling | |
|---|---|
112 |
72 |
88 |
114 |
To convert a layer from the two-dimensional structure of the video images and the convolutional layers that process the video data into a form suitable for input to a traditional Artificial Neural Network (ANN), it is necessary to rearrange the data into a one-dimensional format.
As with the other mathematical operations described earlier, this is a simple procedure. The conversion from a two-dimensional structure to a one-dimensional vector is called flattening. In a flattening layer, the coefficients in the two-dimensional structure are simply transferred sequentially into a vector, which serves as the input to a traditional ANN.
This table presents the results of the previous table after the flattening operation has been performed:
| Result of flattening the previous table | |||
|---|---|---|---|
112 |
72 |
88 |
114 |
This is a one-dimensional vector of numeric values that is in a suitable format for use as input to a traditional ANN.
Following the convolutional, pooling, and flattening stages, a CNN implements one or more ANN layers, each of which forms a hidden layer of neurons. These hidden layers are usually fully connected sets of neurons. Following the hidden layers is an output layer, which presents the final outputs of the network for use in further processing.
When a sufficiently rich set of training data has been combined with an appropriately sized CNN structure capable of learning and retaining the necessary knowledge, it is possible to encode a tremendous amount of information that represents a wide variety of driving situations into the CNN and ANN coefficients.
In a roadworthy autonomous vehicle design, the result of the CNN design and training process is a system that can recognize and identify the object types encountered across the full range of driving situations encountered by drivers daily. This is a tremendously complex task, and it may take several years before the computing technology and software capability (both in the network structure and in the training process) are capable of consistently outperforming human drivers in the tasks of object detection and recognition.
The following figure presents a basic (Stage 1, as described above) CNN architecture that has shown to be capable of steering an autonomous driving system to remain (somewhat) centered in a lane on a curving road:
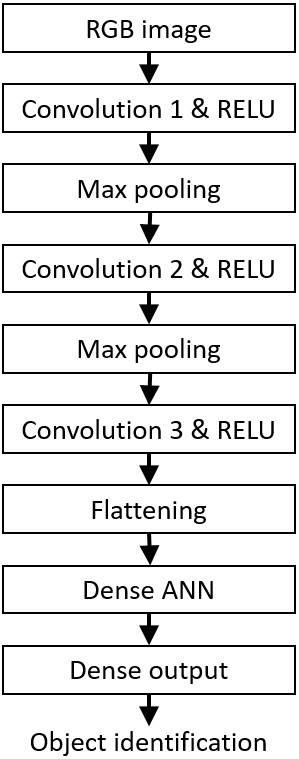
CNN layers used in object identification application
You may wonder how the developer of a CNN for a particular application selects architectural features such as the types and number of layers and other parameters defining the network. In many cases, it is not at all clear what the best combination of layer types and the settings for other network parameters (such as convolution filter dimensions) is for achieving the overall goals of the CNN application.
The types and dimensions of layers and related parameters describing a neural network are referred to as hyperparameters. A hyperparameter is a high-level design feature of a neural network that defines some part of its structure. Hyperparameters are distinct from the weighting factors on the neural connections, which are defined automatically during the training process.
The selection of hyperparameter values to configure a neural network for a particular application can be considered a search process. The architect of the neural network design can use software tools to test a variety of network architectures composed of different sequences of neural network layer types along with different parameter values associated with each layer, such as the dimensions of convolution filters or the number of neurons in a fully connected layer. This search process comprises a training phase for each network configuration followed by a testing phase to evaluate the performance of the trained network. Network designs that perform the best during the testing phase are retained for further evaluation as the design process moves forward.
After developing a dataset describing the state of the vehicle and all the objects relevant to driving the vehicle, the autonomous driving system must make a series of decisions, discussed next.
Decision Processing
Using the information provided during the perception stage of sensor data processing, the autonomous driving system decides upon the actions it will execute at each moment to continue safe vehicle operation while making progress toward the requested destination. The basic functions it must support consist of lane keeping, obeying the rules of the road, avoiding collisions with other objects, and planning the vehicle path. These are the topics of the following sections.
Lane-Keeping
The lane-keeping task requires the vehicle driver (human or autonomous) to continuously monitor the vehicle’s location within the width of the lane it occupies and maintain the vehicle’s position within an acceptable deviation from the center of the lane.
Lane keeping is a straightforward task on a clearly marked road in good weather conditions. On the other hand, an autonomous driving system (or a human driver) may experience significant difficulty staying centered in a lane when lane markings are obscured by fresh snow or mud on the road’s surface.
A lidar-based autonomous driving system should experience little or no impairment while navigating a road surface covered by a light layer of snow, as long as lidar measurements of the surroundings continue to provide valid information. A video camera-based system, however, may experience substantial difficulty in this context.
Complying With the Rules of the Road
Autonomous driving systems must obey all traffic laws and regulatory requirements while operating on public roads. This includes basic functions, like stopping for stop signs and responding appropriately to traffic lights, as well as other necessities, such as yielding the right of way to another vehicle when the situation requires it.
The driving task can become complex when autonomous vehicles must share the road with human-operated vehicles. Humans have developed a range of behaviors for use in driving situations that are intended to make driving easier for everyone. For example, a vehicle on a crowded highway may slow down to provide space for a merging vehicle to enter the roadway.
A successful autonomous driving system must comply with all legal requirements and must also align its behavior with the expectations of human drivers.
Avoiding Objects
Autonomous driving systems are required to perceive and respond appropriately to the entire gamut of inanimate objects and living creatures that drivers encounter on roads every day. This includes not only other vehicles, pedestrians, and cyclists, but also random objects such as ladders, car hoods, tires, and tree limbs that wind up on roads every day. Animals, such as squirrels, cats, dogs, deer, cattle, bears, and moose regularly attempt to cross the roads in various regions.
Human drivers generally attempt to avoid striking smaller animals on the road if it can be done without creating an unacceptably dangerous situation. When encountering a large animal, avoiding impact might be necessary to prevent killing the vehicle’s occupants. Autonomous driving systems will be expected to outperform human drivers under all these conditions.
Planning the Vehicle Path
High-level path planning generates a sequence of connected road segments that the vehicle intends to traverse while traveling from its starting point to its destination. GPS-based route planning systems are familiar to drivers of today’s vehicles. Autonomous vehicles use the same approach to develop a planned path to their destination.
Low-level path planning encompasses all the driving actions along the path to the destination. An autonomous driving system must constantly evaluate its surroundings and make decisions, such as when to change lanes, when it is safe to enter an intersection, and when to give up trying to turn left onto a very busy street and fall back to an alternate route.
As with all aspects of autonomous driving, the highest goals of path planning are to keep the vehicle occupants and others outside the vehicle safe, obey all traffic laws, and, while accomplishing all that, travel to the destination as quickly as possible.
Autonomous Vehicle Computing Architecture
The following figure summarizes the hardware components and the processing stages in an autonomous driving system based on the current state of technology, as described in this chapter.
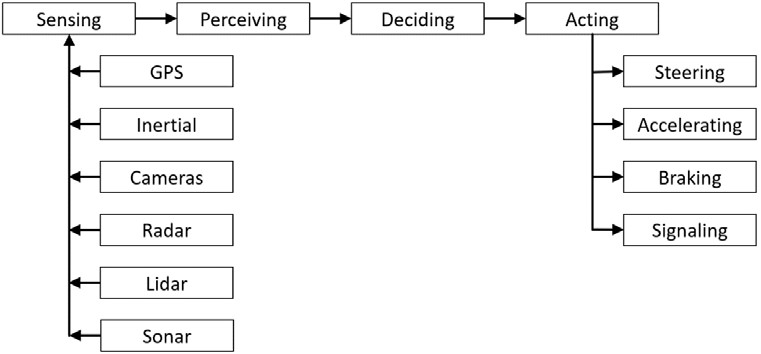
Components and processes of an autonomous driving system
We introduced sensor technologies that gather information about the state of the vehicle and its surroundings. This information flows into a Sensing process, which receives data from the sensors, validates that each sensor is performing properly, and prepares the data for perception. The process of Perceiving takes raw sensor data and extracts useful information from it, such as identifying objects in video images and determining their location and velocity. With an accurate understanding of the vehicle’s state and all relevant surrounding objects, the Deciding process performs high-level navigation functions, like selecting which route to take to the destination, as well as low-level functions, such as choosing what direction to go at an intersection. The process of Acting on these decisions sends commands to hardware units performing steering, controlling vehicle speed, and providing information to other drivers, most notably by operating the turn signals.
This article presented the capabilities required in self-navigating vehicle-processing architectures. We began by introducing driving autonomy levels and the requirements for ensuring the safety of the autonomous vehicle and its occupants, as well as the safety of other vehicles, pedestrians, and stationary objects. We continued with a discussion of the types of sensors and data a self-driving vehicle receives as input while driving. We concluded with an examination of convolutional neural network processing of video images to extract significant features and an overview of the process of making driving decisions based on that information.
Opinions expressed by DZone contributors are their own.
Comments